

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
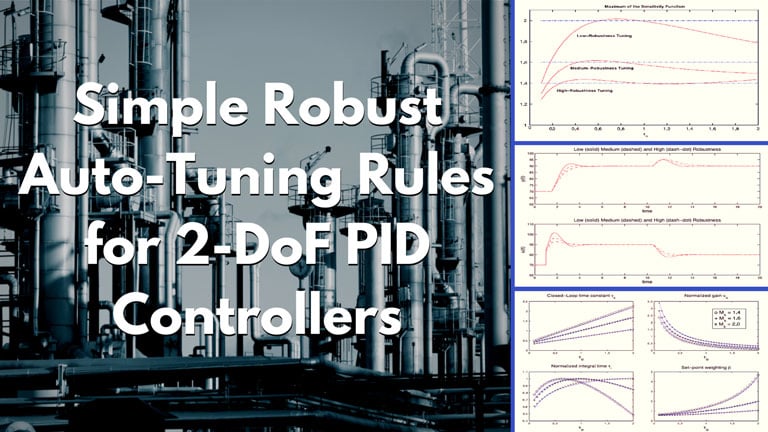
Abstract: This paper addresses the problem of providing simple tuning rules for a two-degree-of-freedom (2-DoF) PID controller (PI2) with robustness considerations. The introduction of robustness as a matter of primary concern is by now well established among the control community. Among the different ways of introducing a robustness constraint into the design stage, the purpose of this paper is to use the maximum sensitivity value as the design parameter. In order to deal with the well known performance/robustness trade-off, an analysis is conducted first that allows the determination of the lowest closed-loop time constant that guarantees a desired robustness. From that point, an analytical design is conducted for the assignment of the load-disturbance dynamics followed by the tuning of the set-point weight factor in order to match, as much as possible, the set-point-to-output dynamics according to a first-order-plus-dead-time dynamics. Simple tuning rules are generated by considering specific values for the maximum sensitivity value. These tuning rules, provide all the controller parameters parameterized in terms of the open-loop normalized dead-time allowing the user to select a high/medium/low robust closed-loop control system. The proposed auto-tuning expressions are therefore compared with other well known tuning rules also conceived by using the same robustness measure, showing that the proposed approach is able to guarantee the same robustness level and improve the system time performance.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
2006 Elsevier Science Ltd. All rights reserved.
