

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
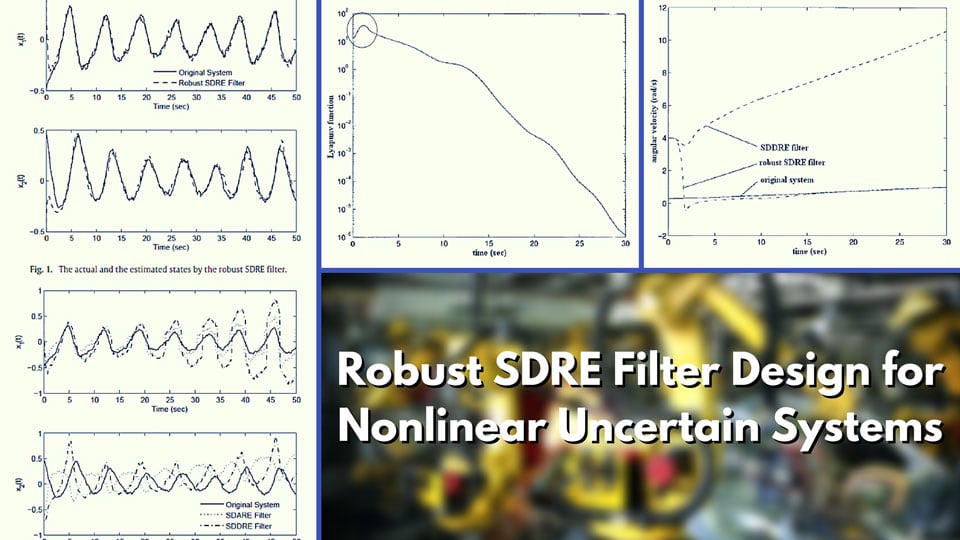
Abstract: In order to remedy the effects of modeling uncertainty, measurement noise and input disturbance on the performance of the standard state-dependent Riccati equation (SDRE) filter, a new robust H∞ SDRE filter design is developed in this paper. Based on the infinity-norm minimization criterion, the proposed filter effectively estimates the states of nonlinear uncertain system exposed to unknown disturbance inputs. Moreover, by assuming a mild Lipschitz condition on the chosen state-dependent coefficient form, fulfillment of a modified H∞ performance index is guaranteed in the proposed filter. The effectiveness of the robust SDRE filter is demonstrated through numerical simulations where it brilliantly outperforms the conventional SDRE filter in presence of model uncertainties, disturbance and measurement noise, in terms of estimation error and region of convergence.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
Copyright 2006-2017 Elsevier Science Ltd. All rights reserved.
