

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
Abstract: This work proposes a solution for the output feedback trajectory-tracking problem in the case of an uncertain DC servomechanism system. The system consists of a pendulum actuated by a DC motor and subject to a time-varying bounded disturbance. The control law consists of a Proportional Derivative controller and an uncertain estimator that allows compensating
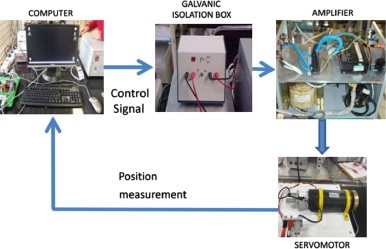 DC servo pendulum prototype used to carried out the actual experiments.
DC servo pendulum prototype used to carried out the actual experiments.
the effects of the unknown bounded perturbation. Because the motor velocity state is not available from measurements, a second-order sliding-mode observer permits the estimation of this variable in finite time. This last feature allows applying the Separation Principle. The convergence analysis is carried out by means of the Lyapunov method. Results obtained from numerical simulations and experiments in a laboratory prototype show the performance of the closed loop system.
Free Bonus: To read the full article on output feedback trajectory stabilization, click here.
ISA membership entitles you to free access to all ISA Transactions articles plus a wealth of technical content, industry information, free webinars, training opportunities, program discounts, certification and licensure and professional networking.
Join ISA ... learn, advance, succeed!
2006 Elsevier Science Ltd. All rights reserved.
