

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
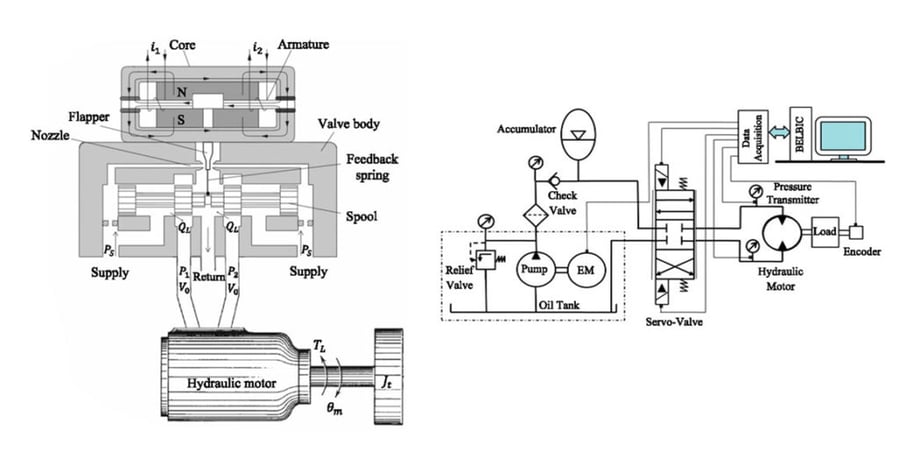
Abstract: This paper presents a new intelligent approach for adaptive control of a nonlinear dynamic system. A modified version of the brain emotional learning based intelligent controller (BELBIC), a bio-inspired algorithm based upon a computational model of emotional learning which occurs in the amygdala, is utilized for position controlling a real laboratorial rotary electro-hydraulic servo (EHS) system. EHS systems are known to be nonlinear and non-smooth due to many factors such as leakage, friction, hysteresis, null shift, saturation, dead zone, and especially fluid flow expression through the servo valve. The large value of these factors can easily influence the control performance in the presence of a poor design. In this paper, a mathematical model of the EHS system is derived, and then the parameters of the model are identified using the recursive least squares method. In the next step, a BELBIC is designed based on this dynamic model and utilized to control the real laboratorial EHS system. To prove the effectiveness of the modified BELBIC’s online learning ability in reducing the overall tracking error, results have been compared to those obtained from an optimal PID controller, an auto-tuned fuzzy PI controller (ATFPIC), and a neural network predictive controller (NNPC) under similar circumstances. The results demonstrate not only excellent improvement in control action, but also less energy consumption.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
2006 Elsevier Science Ltd. All rights reserved.
