

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
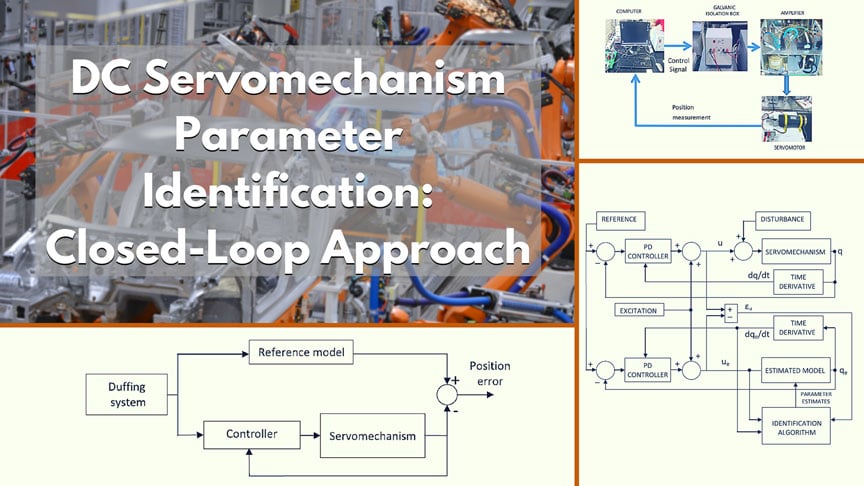
Abstract: This paper presents a Closed Loop Input Error (CLIE) approach for on-line parametric estimation of a continuous-time model of a DC servomechanism functioning in closed loop. A standard Proportional Derivative (PD) position controller stabilizes the loop without requiring knowledge on the servomechanism parameters. The analysis of the identification algorithm takes into account the control law employed for closing the loop. The model contains four parameters that depend on the servo inertia, viscous, and Coulomb friction as well as on a constant disturbance. Lyapunov stability theory permits assessing boundedness of the signals associated to the identification algorithm. Experiments on a laboratory prototype allows evaluating the performance of the approach.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
2006 Elsevier Science Ltd. All rights reserved.
