

This post is an excerpt from the journal ISA Transactions. All ISA Transactions articles are free to ISA members, or can be purchased from Elsevier Press.
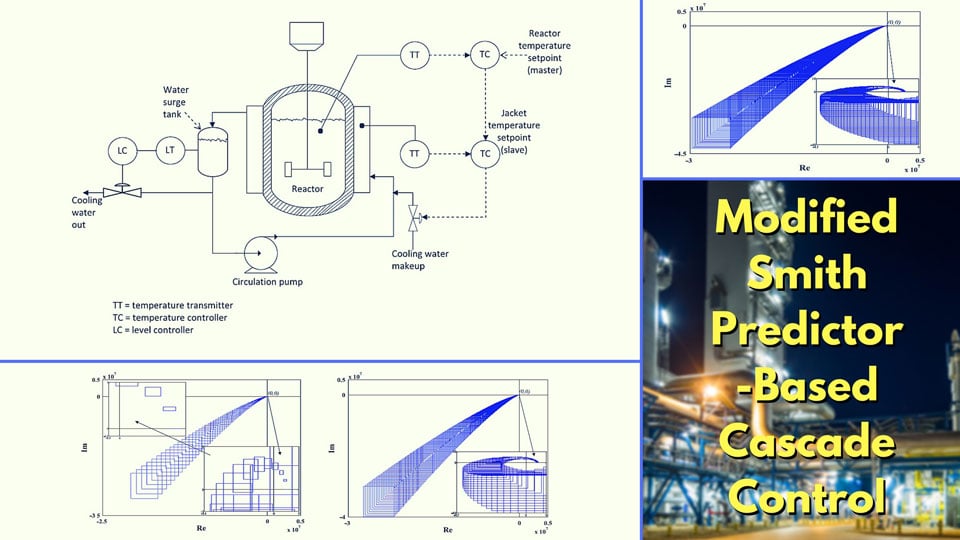
Abstract: An improved cascade control structure with a modified Smith predictor is proposed for controlling open-loop unstable time delay processes. The proposed structure has three controllers of which one is meant for servo response and the other two are for regulatory responses. An analytical design method is derived for the two disturbance rejection controllers by proposing the desired closed-loop complementary sensitivity functions. These two closed-loop controllers are considered in the form of proportional–integral-derivative (PID) controller cascaded with a second order lead/lag filter. The direct synthesis method is used to design the setpoint tracking controller. By virtue of the enhanced structure, the proposed control scheme decouples the servo response from the regulatory response in case of nominal systems i.e., the setpoint tracking controller and the disturbance rejection controller can be tuned independently. Internal stability of the proposed cascade structure is analyzed. Kharitonov’s theorem is used for the robustness analysis. The disturbance rejection capability of the proposed scheme is superior as compared to existing methods. Examples are also included to illustrate the simplicity and usefulness of the proposed method.
Free Bonus! To read the full version of this ISA Transactions article, click here.
Join ISA and get free access to all ISA Transactions articles as well as a wealth of other technical content, plus discounts on events, webinars, training & education courses, and professional certification.
Click here to join ... learn, advance, succeed!
2006-2017 Elsevier Science Ltd. All rights reserved.
