

Nowadays, all process industry equipment is furnished with controllers that allow the equipment to operate automatically. However, several controllers in process plants interact with one another. Interaction is good in our society, but it is detrimental in controllers. They interact with one another and disrupt the process because they desire to keep their controlled variable constant based on the set point. Tuning is challenging when two or more controllers are interacting, and standard tuning parameters are insufficient to attain the set-point without disturbance and overshoot.
There are two kinds of interactions: It might be of the cooperative or combative variety. When it is cooperative, it may be adjusted for by tuning constants, but when it is conflicting, it is disastrous and necessitates the use of a decoupler.
As shown in Figure 1, let’s look at an example of a dryer regeneration circuit (adsorbent or desiccant), where hot and cold gas is utilized to heat and cool the dryer bed to remove the water moisture. Both gases are diverted to the dryer via a single line, and there are two controllers.
One is a flow controller (FIC) that maintains the flow rate to the dryer (a higher flow rate can lift or fluidize the bed because regeneration gas flow is countercurrent direction). The other is a temperature controller (TIC) that maintains the temperature of the gas to heat the bed and remove the water moisture. Any change in the set point of TIC during regeneration will disrupt the flow, and FIC will be affected as well, and the inverse is also true. One controller changes another’s controlled variable, while another attempts to keep that controlled variable constant. Based on the process transfer function, this cooperative interaction would stabilize the system in 5 to 10 minutes. The interaction of another controller should be used to tune this type of system.
To evaluate how sensitive the interaction is, the relative gain of both controllers can be determined. The ratio of the process gain of one loop when the other control loop is open (controller in manual mode) to the process gain when the other loop is closed (controller in auto mode) is known as relative gain.
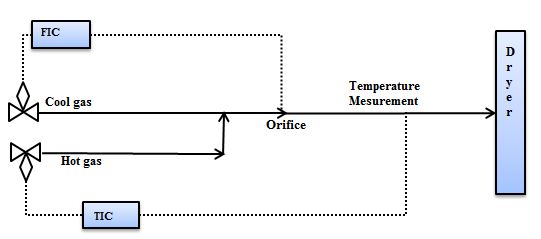 Figure 1
Figure 1
Interaction is unavoidable in this type of loop. Wherever mixing occurs, a similar form of the loop can be discovered. The biggest log modulus tuning (BLT) method should be utilized to avoid significant overrun during auto control of both controllers. It is the most appropriate strategy of tuning for such interactions.
First, determine the strength of interaction using relative gain. If the relative gain is less than one and close to one, the detune factor of 1.5 should be used. It is significantly more interactive when the relative gain is near zero. Detune factor 3 or 4 for use in such situations. As a general guideline, determine the tuning parameter by bump testing of the individual controller, and then divide the controller's gain by 3. It will be slow and sluggish, but it will work.
Another sort of interaction is conflicting, which occurs when two controllers run in different directions and disrupt the operation. In this instance, a decoupler is required to prohibit the interaction of both controllers. A decoupler functions similarly to a feed-forward model parameter, in that it is used to eliminate the influence of one controller over another. Some distillation columns connect the pressure controller to reflux and bottom specification or bottom level controller to the reboiler. When the pressure in the column rises, the pressure controller increases the amount of reflux liquid in the column, which raises the bottom level and cools the bottom of the column. The bottom specification controller or bottom level controller will boost reboiler heat and improve column pressure.
Another example is the controller’s compressor performance and anti-surge controller interaction. These types of controllers always need a decoupler, which will further be discussed in my next blog.
References
- George Stephanopoulos, “Chemical process control” PTR Prentice hall, Englewood Cliffs, New Jersey.
- McMillan G.K., Douglas M.C., “Process/Industrial Instruments and Controls Handbook” McGraw-Hill Fifth Edition (1999).

